























This site is best viewed in Google Chrome, Firefox or Safari. Click here to remove this message.
Stainless Steel Motor Filter is Held in place using the Motor filter holder
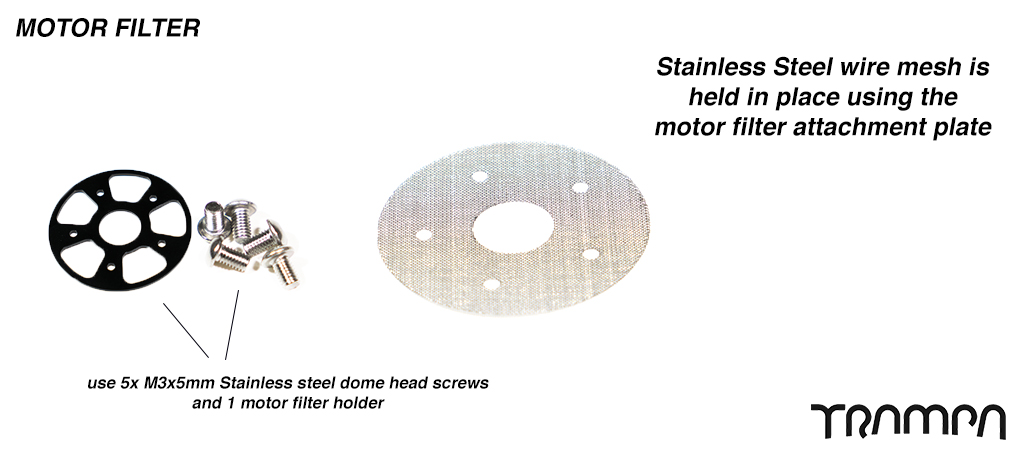
This Stainless Steel 'Motor END FILTER' fits into the end of any of TRAMPA's motors,
Fitting filters to your motors prevents dust n debris from entering the motor whilst still allowing cool air enter & pass though, encouraging cool operating temperatures.
This circular Stainless Steel Filter is pre-punched with the fixing holes to fit to all TRAMPA Motors. It requires the STAR SHAPED ALUMINUM END FILTER HOLDER to secure the end filter into place, whilst M3x4mm Dome Headed bolts screw through the star holder & filter turning directly into the end of the motor.
This Stainless Steel 'Motor END FILTER' fits into the end of any of TRAMPA's motors,
Fitting filters to your motors prevents dust n debris from entering the motor whilst still allowing cool air enter & pass though, encouraging cool operating temperatures.
This circular Stainless Steel Filter is pre-punched with the fixing holes to fit to all TRAMPA Motors. It requires the STAR SHAPED ALUMINUM END FILTER HOLDER to secure the end filter into place, whilst M3x4mm Dome Headed bolts screw through the star holder & filter turning directly into the end of the motor.
Weight: 2g
HCC: 72189920
Related Products
-

HALF CAGE Motor protection Housing - PINK - -

HALF CAGE Motor protection Housing - SILVER - -
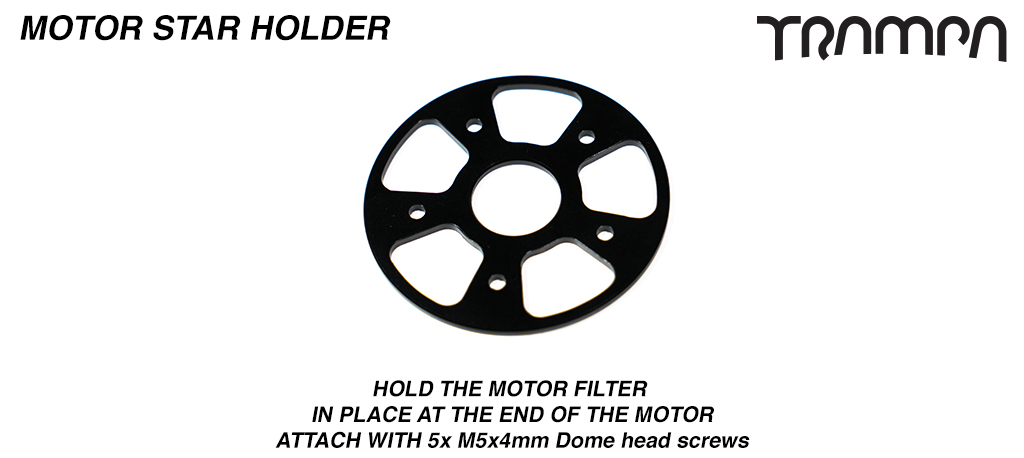
Aluminium Star Shaped Motor Filter Holder for all 63mm size Motors - -

MkII FULL Motor Protection - Stainless Steel Mesh FILTER - -

HALF CAGE Stainless Steel Motor protection FILTER - BLACK - -

HALF CAGE Motor protection Housing - GREEN - -

HALF CAGE Motor protection Housing - GOLD - -

HALF CAGE Motor protection Housing - BLUE - -

HALF CAGE Motor protection Housing - BLACK - -

HALF CAGE Motor protection Housing - BRONZE - -
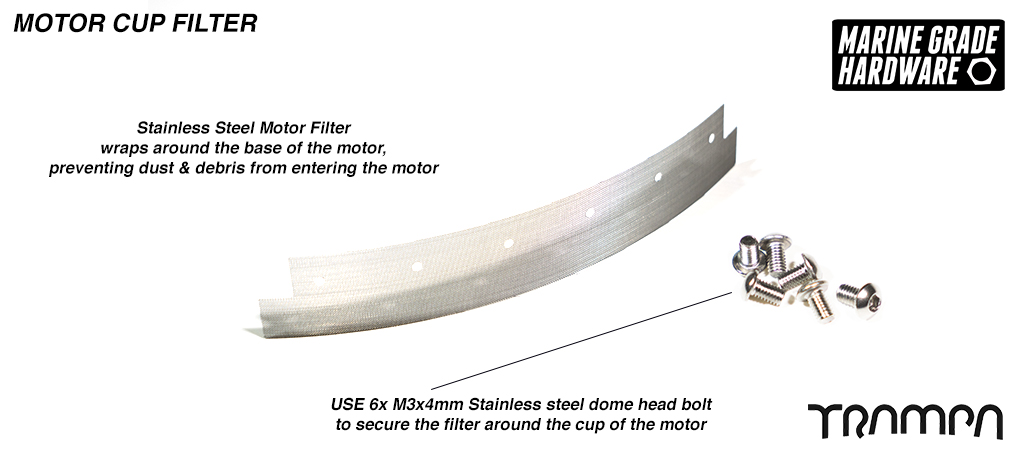
Stainless Steel Motor filter wraps around the CAN of the 63mm TRAMPA motors preventing dust n debris from entering the motor - -

HALF CAGE Motor protection Housing - PURPLE - -

HALF CAGE Motor protection Housing - GUNMETAL - -

FULL CAGE Motor protection - Fits Motor Fan & Coloured Stainless Steel Filters - -
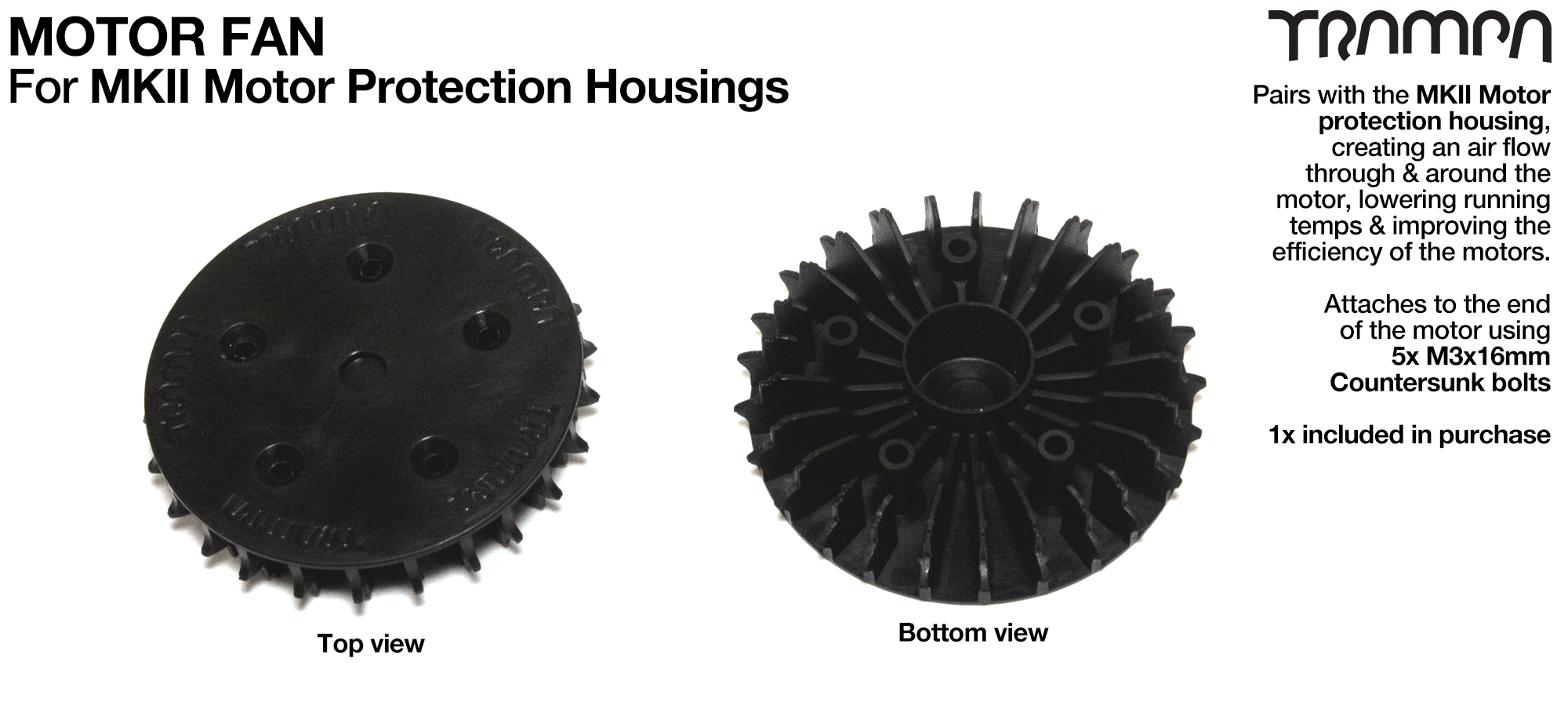
Motor Fan - Connects to the end of the Motor & Spins to help maintain temps low - -

HALF CAGE Motor protection Housing - RED -







All images and material on this site not covered by other copyright and not explicitly marked as public domain is © Trampa Boards 2000 - 2026